Description
This module is designed to work as the pointing program in a ADCS software chain as shown in the figure below:
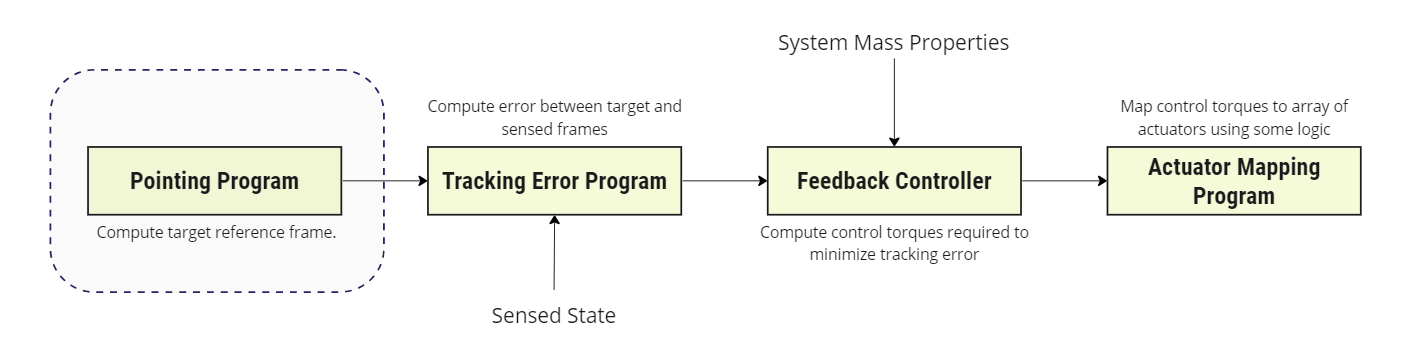
This module outputs a target reference frame that is this aligned with the inertially fixed frame e.g. the Earth-Centered Inertial (ECI) frame for the case where the SPICE zero-base is set to Earth.
Example Use Cases
- Compute the inertial 3D reference frame for pointing applications: Constructs a reference frame with a fixed orientation and zero body rates in the inertial frame e.g. de-tumble.
Module Implementation
This module requires a desired reference orientation . This input is set once and is fixed in the simulation. As the fixed-pointing is inertial, the output attitude reference message describing the target reference frame in is: