Description
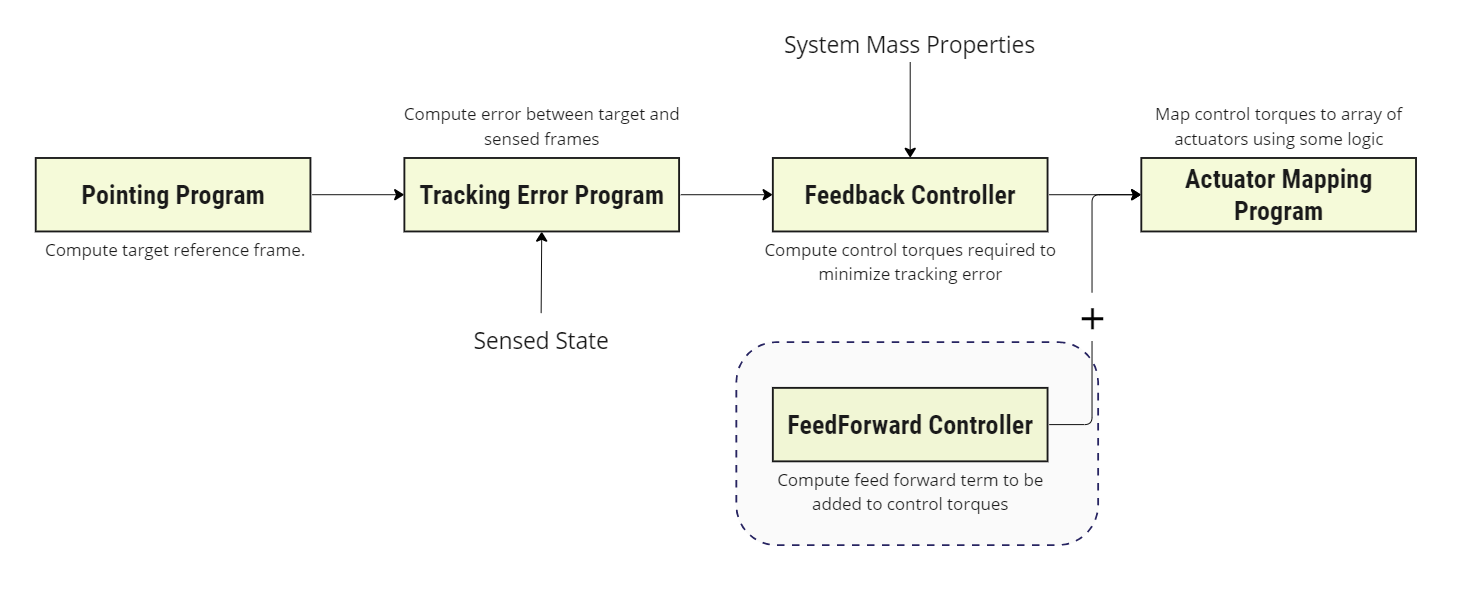
The purpose of this module is to compute the torque that is expected to be produced by a Magnetic Torque Bar Array and apply this to the current commanded body torques as a feedforward term as part of a RW Momentum Control Software. In essence, negating a portion of a command torque being passed to a reaction wheel system via a module such as MRP Feedback Control Software as shown below.
NOTE
This module separates the actual torques applied to the body by the MTB array from the estimated torques. This is important for error modelling, where your sensed Magnetic Field or the configuration of your MTB is different from the actual values.
Example Use Cases
- Reaction Wheel De-Saturation: This module can be used as a momentum management strategy to de-saturate reaction wheels by reducing/negating torque commands.
Module Implementation
Given a known body torque command in the body frame , this module computes a feedforward torque to negate a portion of this command torque. This feedforward term is estimated as the torque produced by an MTB array i.e.
Here, is the steering matrix that describes the orientation of the MTB array, are the commanded body frame dipoles and is the local magnetic field in the body frame .
The resultant torque command passed to actuators other than the MTB array is then:
This module is generally paired with a momentum management strategy, which provides commands to the MTB array to de-saturate reaction wheel sub-systems.