With certain components within astrodynamic simulations, there are available error models. Within the backend system, many of these are known as Component Models, which are objects that are attached to the simulation objects. Many of these provide error models that can update the target object for each tick. This guide is a directory of the various component error models available for each simulated system, in which each simulation subsystem is grouped. Instructions on how to induce select error conditions via specific component model configurations are also provided.
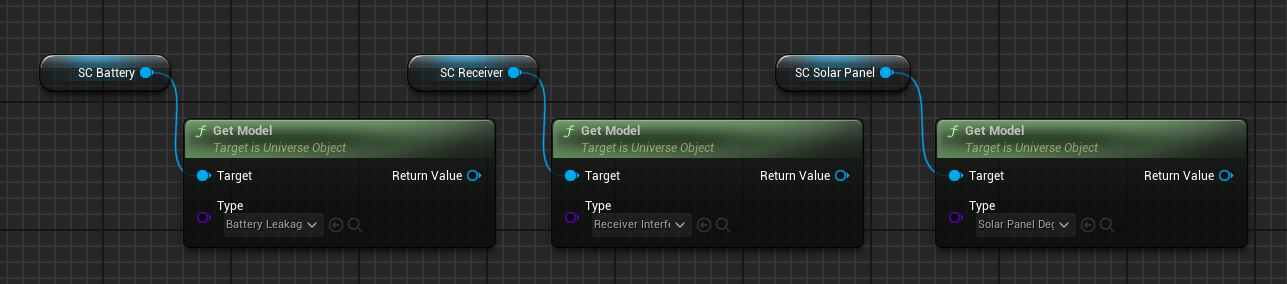
To attach a component model to an object, call GetModel on the object and select the error model type in the Type field. Component error models will start with the name of the component e.g. Battery Leakage Error Model Some examples are shown below:
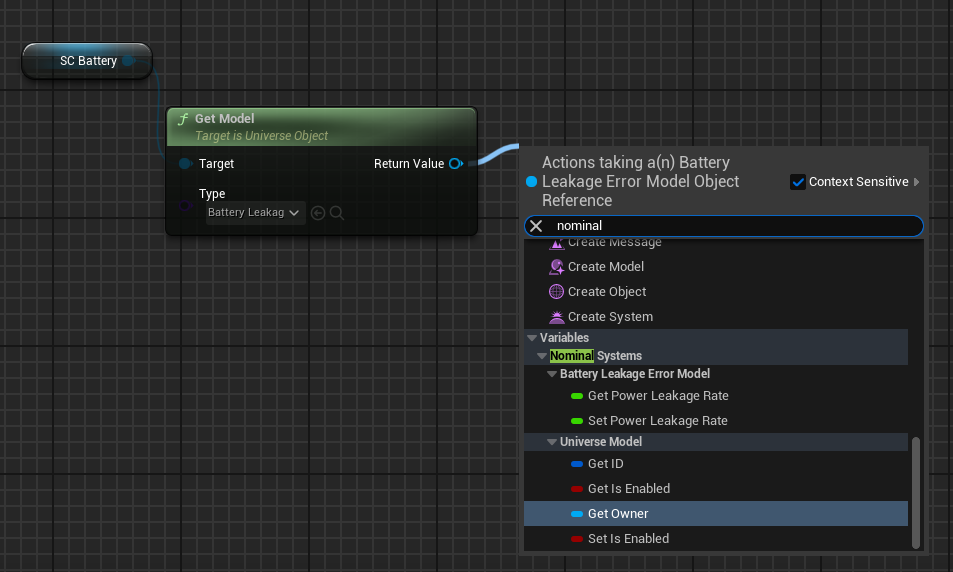
A quick way to see all the values you can modify in an error model is to type in Zendir in the search bar as seen below.
Available Error Models
Error models follow this naming structure in blueprints [ComponentName][ModelName]ErrorModel
- Actuators
- Magnetic Torque Bar Array
Hysteresis Error Model: Adds the phenomenon where the magnetization of a material lags behind the applied magnetic field, creating a loop-like hysteresis curve when the field is varied.
- Magnetic Torque Bar Array
- Data
- Antenna
Frequency Drift Error Model: Configures a drift in the frequency over time with a constant rate.
- Laser Transmitter
Optical Alignment Error Model: Configures a misalignment of the optical sensor that slowly nudges the sensor outside of the direct line of sight.
- Partitioned Data Storage
Bit Flipping Error Model: Causes random bits within the storage to flip due to cosmic events that are predicted using a Normal distribution probability.Data Loss Error Model: Causes random events for data loss within the storage system based on time and a Normal distribution probability.Lockup Error Model: Causes random events that will result in the storage system locking up and preventing data from being written or read from the node for some time.
- Receiver
Interference Error Model: Configures interference that may result in data being lost or taking a longer time to process due to too much noise.
- Transmitter
Packet Corruption Error Model: Configures noise on the transmitter that results in packets of data being lost when transmitted based on a Normal distribution probability.
- Antenna
- Power
- Power Source
Unsteady Error Model: Configures an unsteady connection with the power bus, resulting in the power being lost over time due to the wires not being configured perfectly.
- Power Storage
Leakage Error Model: Causes the battery to slowly leak at a constant rate, losing power without the result of providing current to the circuit.
- Solar Panel
Degradation Error Model: Slowly degrades the efficiency of the solar panel in units of % per year. This is a small effect but is present in longer simulations.
- Power Source
Inducing Error Conditions
Some error configurations are set by updating particular parameters on the components in a certain value, rather than by adding a component model to the object. In each case, the description of what the error will do and which parameter to update is written below.
Accelerometer Discretization Error
This error will discretize the sensor of the accelerometer to a certain factor. It can be configured by setting the Scale Factor value on the accelerometer.
Accelerometer Gauss-Markov Process Noise Error
This error will apply random noise values using a Gauss-Markov distribution with the sensor data for the accelerometer. It can be set by configuring the Walk Bounds and P Matrix values on the accelerometer.
Accelerometer Instrument Bias
This error will adjust the bias along the translational access for the accelerometer. It can be set by configuring the Bias value on the accelerometer.
Accelerometer Random Walk Bias
This error will adjust the random walk bias for the sensor and induce noise for the sensor data for the accelerometer. It can be set by configuring the P Matrix value on the accelerometer.
Accelerometer Saturation Error
This error will over or under-saturate the sensor data for the accelerometer. It can be set by configuring the Max Output value on the accelerometer.
Coarse Sun Sensor Instrument Bias
This error will discretize the sensor of the coarse sun sensor to a certain factor. It can be configured by setting the Bias value on the coarse sun sensor.
Coarse Sun Sensor Gauss-Markov Process Noise Error
This error will apply random noise values using a Gauss-Markov distribution with the sensor data for the coarse sun sensor. It can be set by configuring the Noise Std values on the coarse sun sensor.
Coarse Sun Sensor Saturation
This error will over or under-saturate the sensor data for the coarse sun sensor. It can be set by configuring the Scale Factor values on the coarse sun sensor.
Coarse Sun Sensor Stuck Max
This error will create a maximum output value for the coarse sun sensor, preventing any value from exceeding this. This error can be induced by setting the Fault State enumerator on the coarse sun sensor to Fault Max.
Fuel Control Chain Fuel blockage
Fuel blockage can be induced by setting the Maximum Flow Rate of the Fuel Source to a number below its current value. Note that the maximum flow rate has a minimum value of 0.
Gyroscope Discretization Error
This error will discretize the sensor input of the gyroscope to a certain factor. It can be set by configuring the Scale Factor value on the gyroscope.
Gyroscope Gauss-Markov Process Noise Error
This error will apply random noise values using a Gauss-Markov distribution with the sensor data for the gyroscope. It can be set by configuring the Walk Bounds and P Matrix values on the gyroscope.
Gyroscope Instrument Bias
This error will adjust the bias along the translational access for the accelerometer. It can be set by configuring the Bias value on the gyroscope.
Gyroscope Random Walk Bias
This error will adjust the random walk bias for the sensor and induce noise for the sensor data for the gyroscope. It can be set by configuring the P Matrix value on the gyroscope.
Gyroscope Saturation Error
This error will over or under-saturate the sensor data for the gyroscope. It can be set by configuring the Max Output value on the gyroscope.
Magnetometer Instrument Bias
This error will adjust the bias along the translational access for the magnetometer. It can be configured by setting the Bias value on the magnetometer.
Magnetometer Instrument Noise
This error will create noise on the output of the magnetometer. It can be configured by setting the Noise Std value on the magnetometer.
Radar Distance Error
The RADAR Payload features Dynamic and Constant Error parameters that affect the returned distance measurement. These values can be manipulated to induce the results of various error conditions.
Reaction Wheels Misconfiguration
A misconfiguration of the reaction wheels will result in undesirable behaviour from one or many reaction wheels in the reaction wheel array. Typically, this is configured by incorrectly assigning the Wheel Spin Axis (B) vector.
Reaction Wheels Fully Coupled and Imbalanced
The reaction wheel simple jitter model will induce a fully coupled jitter noise model to the reaction wheel actuator. This is configured by changing the Wheel Model Type to a JITTER FULLY COUPLED state.
Reaction Wheels Simple Jitter
The reaction wheel simple jitter model will induce a simple-jitter noise model to the reaction wheel actuator. This is configured by changing the Wheel Model Type to a JITTER SIMPLE state.
Reaction Wheels Stuck Wheel
The reaction wheel stuck status will stop a wheel from responding to commands. It will not stop the wheel from spinning but prevent any new input from occurring. This is configured by changing the RW Status to a STUCK state.
Star Tracker Gauss-Markov Process Noise Error
This error will apply random noise values using a Gauss-Markov distribution with the sensor data for the star tracker. It can be set by configuring the Walk Bounds and P Matrix values on the star tracker.
Star Tracker Instrument Bias
This error will adjust the random MRP errors to the star tracker by inducing a constant bias to the input navigation controller before processing the sensor output data. It can be set by configuring the Mrp Errors in the star tracker.
Star Tracker Random Walk
This error will adjust the random walk bias for the sensor and induce noise for the sensor data for the star tracker. It can be set by configuring the Walk Bounds value on the star tracker.
Thruster Dispersion Error
The Thruster Dispersion Factor variable needs to be configured as desired to implement this error. The Dispersion Factor variable causes a reduction in the thrust from the thruster when firing to simulate the effects of the thrust not being aligned to the nozzle.