Description
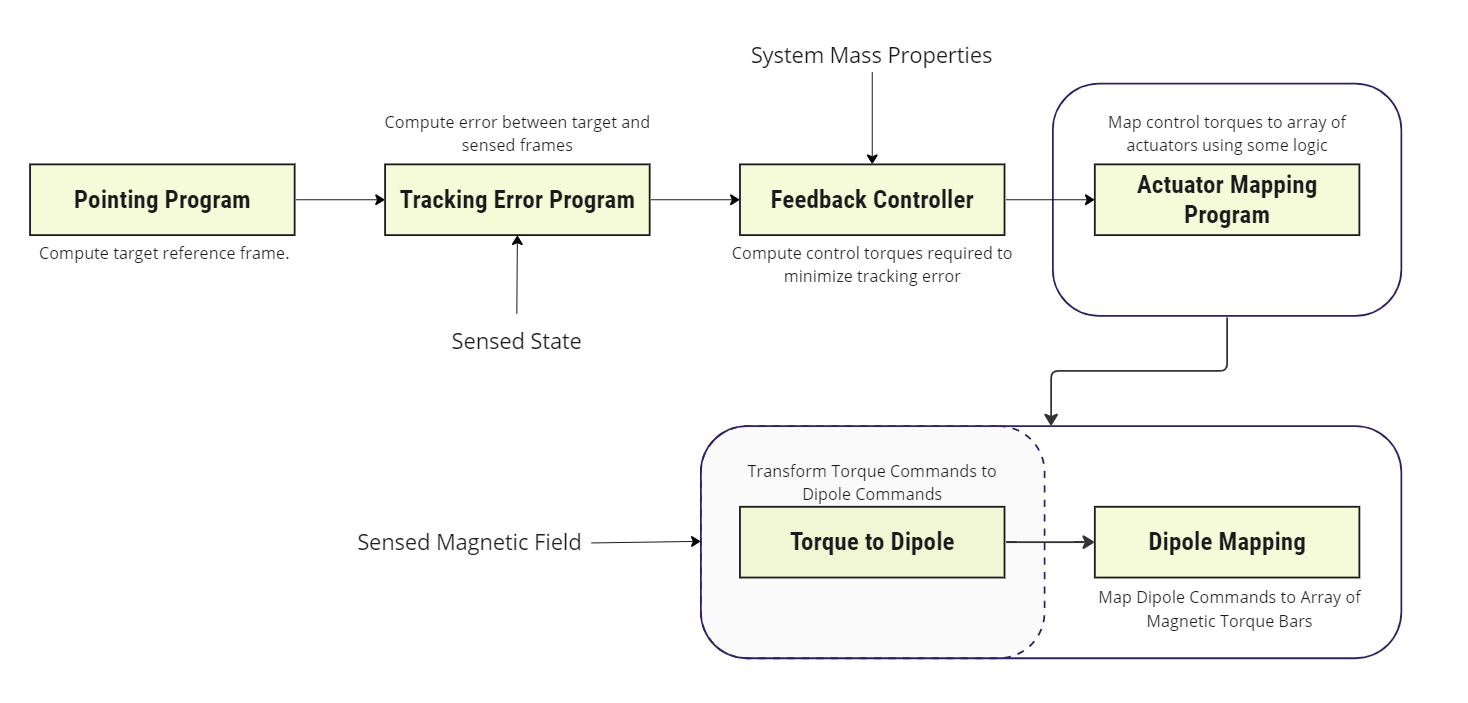
The purpose of this module is to map a desired body frame torque to an equivalent body from dipole command given a sensed magnetic field in the body frame. This will produce the torque in the local magnetic field vectors. This assumes data from a Magnetometer.
Example Use Cases
- Compute dipole commands: Transform a torque command into a dipole command based on local magnetic field readings.
Module Implementation
The dipole vector in the body frame can be represented by the equation:
The sensed magnetic field is intended to be provided by a three-axis magnetometer (TAM) module, which may also implement various error modules. Alternatively, the user may directly connect the local magnetic field message as an input.
Assumptions/Limitations
- This module inherits measurement assumptions from the sensed magnetic field state.