Description
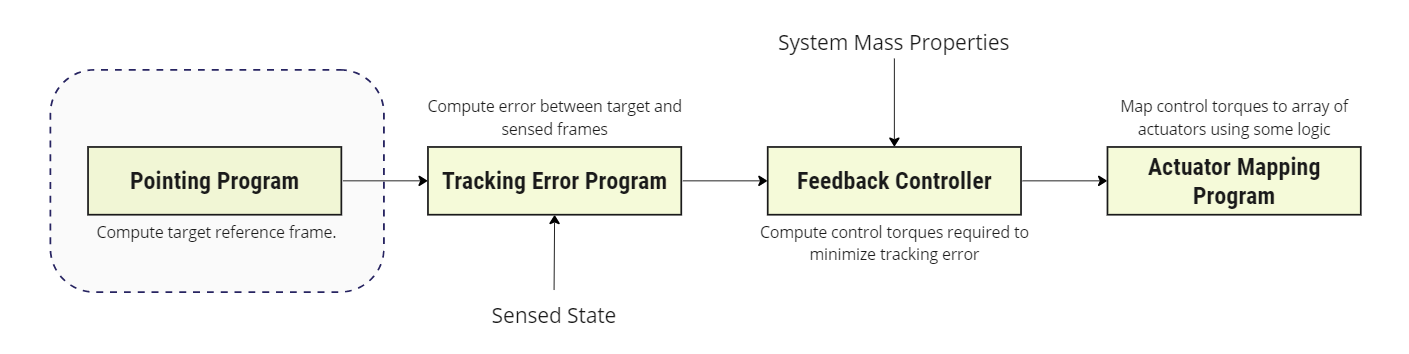
This module is defined to work as part of a pointing program in an ADCS software chain as shown below.
This module is used to modify an existing pointing reference by a known, constant rotation. Given an input reference frame this module computes a corrected frame .
Example Use Cases
- Re-orient an existing pointing reference. For example, modify the Nadir Pointing Software frame to point the z-axis towards the parent body (rather than in the direction of the angular momentum). This may be used for ground-pointing for planetary observation applications.
- Re-orient the spacecraft coordinate system. Allows for aligning specific features or components on the Spacecraft with the pointing reference.
Module Implementation
The module performs the following computation:
Where the inputs are the DCM which represents the input frame , and the DCM which represents the reference frame correction. The DCM is the resulting corrected reference frame . All inputs and outputs are provided as equivalent MRP Vectors.
The correction can be specified directly, in which case the resulting ADCS software chain will align the spacecraft body frame with the corrected reference frame . Alternatively, a body-frame correction can be specified, in which case the resulting ADCS software chain will align a corrected spacecraft body frame with instead. This is implemented by finding the equivalent corrected reference frame to achieve this pointing, which is given by
This gives the corrected reference frame such that when aligns with , aligns with as desired. The angular velocity and angular acceleration of the corrected frame are the same as for the input frame .
Assumptions/Limitations
- Either or may be specified, but not both. To achieve both a reference frame correction and a body-frame correction two Attitude Reference Correction modules may be used. Alternatively, one Attitude Reference Correction may be used for the reference frame correction, and the body-frame correction specified in the
Attitude Tracking Errormodule. - The correction or is assumed to be a constant rotation.
References
[1] Hanspeter Schaub and John L. Junkins. Analytical Mechanics of Space Systems. AIAA Education Series, Reston, VA, 3rd edition, 2014.